Series: The Sequentia Lectures: Unlocking the Math of AI
Part 6: Advanced Architectures & Concepts
Lecture 57: Reinforcement Learning 101: Teaching AI Through Trial and Error (Rewards)
So far in our lectures, we’ve explored two major types of machine learning: Supervised Learning (learning from labeled data with an “answer key”) and Unsupervised Learning (finding hidden patterns in unlabeled data).
Today, we introduce the third and perhaps most distinct paradigm: Reinforcement Learning (RL).
Reinforcement Learning isn’t about learning from a static dataset. It’s about learning how to behave in an environment by performing actions and seeing the results. It’s the science of making optimal decisions, and the learning process is a dynamic game of trial and error, guided by rewards and penalties.
The Core Analogy: Training a Pet
The most intuitive way to understand RL is to think about how you might train a pet, like a dog.
- You don’t give the dog a textbook on how to sit.
- You don’t show it thousands of pictures of other dogs sitting.
- Instead, you create a situation. You say the command “Sit.” The dog might do nothing, it might lie down, or it might happen to sit.
- If it sits, you immediately give it a reward (a treat, praise).
- If it does something else, it gets no reward (a neutral outcome or a mild “penalty”).
Over time, through this process of trial, error, and reward, the dog learns to associate the action (“sitting”) with the state (“hearing the command ‘Sit'”) to maximize its future rewards. It builds a “policy” for how to act. This is the essence of Reinforcement Learning.
The Key Components of Reinforcement Learning
Every RL problem can be broken down into a few key components:
- The Agent: This is the AI model we are training. It’s the “learner” or “decision-maker.” (The dog).
- The Environment: This is the world in which the agent operates. It can be a real-world setting, a video game, a simulation of the stock market, or a board game like Go. (The room you’re training the dog in).
- The State (S): A complete description of the environment at a single point in time. (The dog hears the “Sit” command, sees you holding a treat).
- An Action (A): One of the possible moves the agent can make. (The dog can sit, stand, lie down, bark).
- A Reward (R): A numerical feedback signal that the environment provides after the agent takes an action. The reward tells the agent how “good” that action was in that state. (Getting the treat is a positive reward).
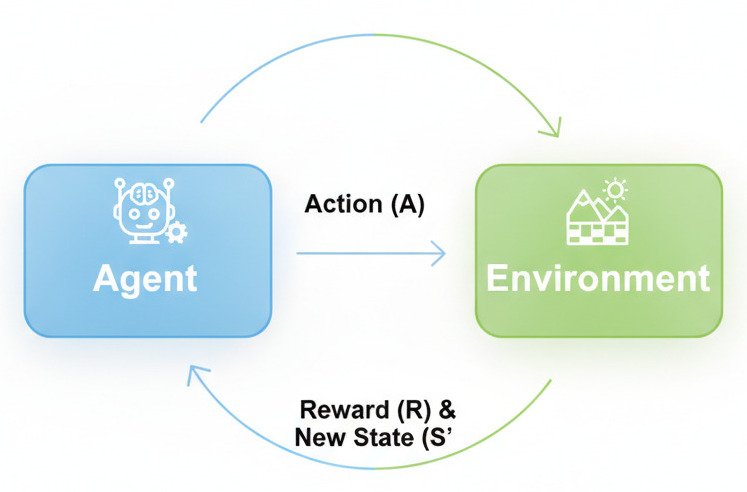
The Agent-Environment Loop: The Cycle of Learning
Reinforcement Learning proceeds in a continuous loop:
- The agent observes the current State of the environment.
- Based on this state, the agent chooses an Action.
- The environment updates itself based on the agent’s action and returns two things:
- A Reward (or penalty).
- The New State of the environment.
- The agent receives this reward and new state, and uses this information to update its internal “policy” or strategy.
- The loop repeats.
The Goal: Maximize Cumulative Reward
Crucially, the agent’s goal is not just to get the biggest immediate reward. Its goal is to choose actions that will maximize the total cumulative reward over the long run.
This is a key distinction. Sometimes, an action that gives a small immediate reward might lead to a better state that unlocks much larger rewards later on. This is known as the “credit assignment problem”—figuring out which of a long sequence of actions was truly responsible for the final outcome. This is what makes RL challenging and powerful. It learns not just immediate gratification, but long-term strategy.
Applications: From Games to Robotics
This paradigm of learning through interaction and reward is incredibly powerful for tasks that involve decision-making and control:
- Game Playing: This is where RL has had some of its most famous successes. AlphaGo learned to play the game of Go by playing millions of games against itself, learning a policy that led to winning (a large final reward).
- Robotics: Training a robot to walk, grasp objects, or navigate a factory. The robot tries different motor controls (actions) and receives positive rewards for successfully completing a task.
- Autonomous Systems: Optimizing the operation of a data center’s cooling system or managing a fleet of self-driving taxis to maximize efficiency.
- Chemistry & Drug Discovery: Finding the optimal sequence of chemical reactions to synthesize a new molecule.
Reinforcement Learning represents a shift from learning about data to learning from interaction. It’s a powerful framework for training agents that can operate autonomously in complex, dynamic environments, all guided by the simple yet profound principle of maximizing rewards.
